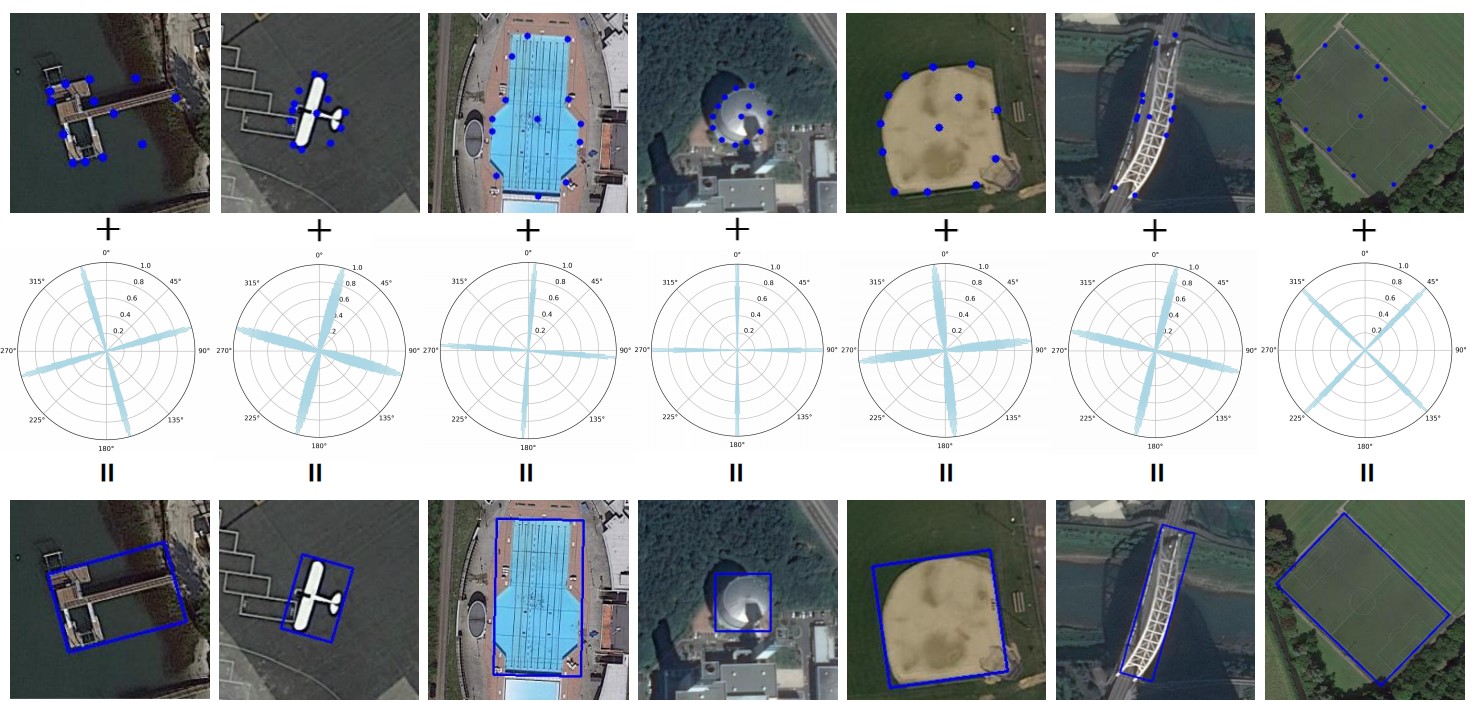
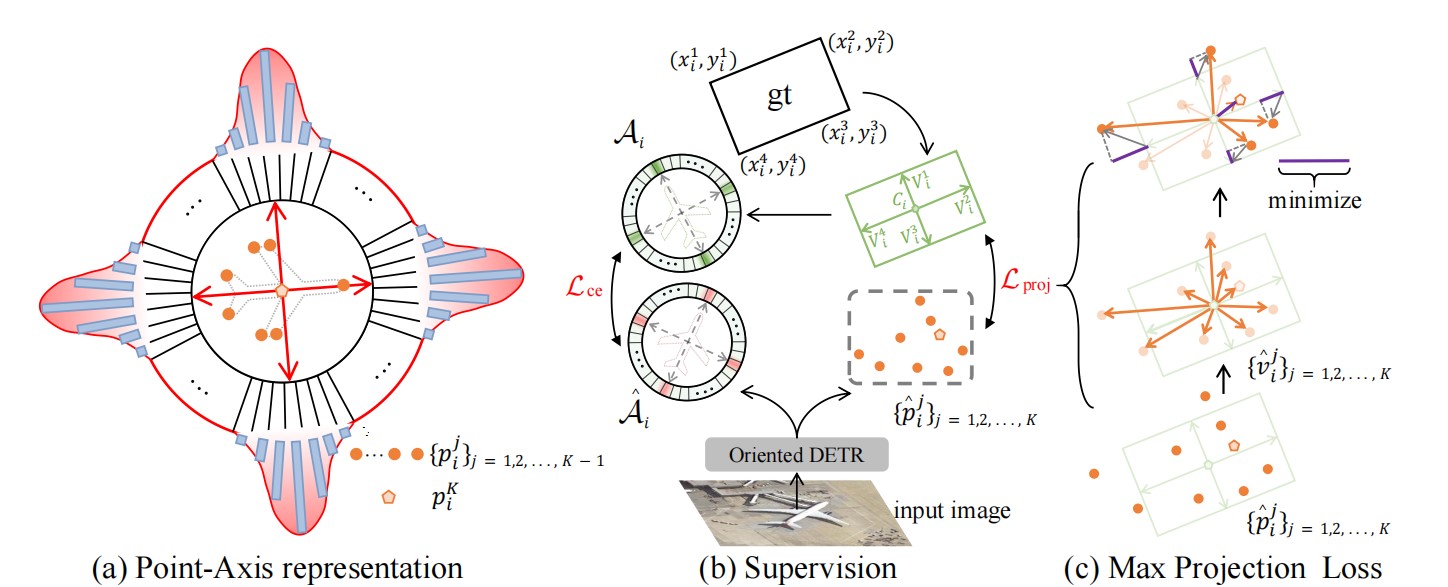
This paper introduces the point-axis representation for oriented object detection, as depicted in aerial images in Figure~\ref{intro_vis}, emphasizing its flexibility and geometrically intuitive nature with two key components: points and axes. 1) Points delineate the spatial extent and contours of objects, providing detailed shape descriptions. 2) Axes define the primary directionalities of objects, providing essential orientation cues crucial for precise detection. The point-axis representation decouples location and rotation, addressing the loss discontinuity issues commonly encountered in traditional bounding box-based approaches. For effective optimization without introducing additional annotations, we propose the max-projection loss to supervise point set learning and the cross-axis loss for robust axis representation learning. Further, leveraging this representation, we present the Oriented DETR model, seamlessly integrating the DETR framework for precise point-axis prediction and end-to-end detection. Experimental results demonstrate significant performance improvements in oriented object detection tasks.
Keywords: Oriented Object Detection, Aerial Object Detection, Point-Axis Representation, Detection Transformer
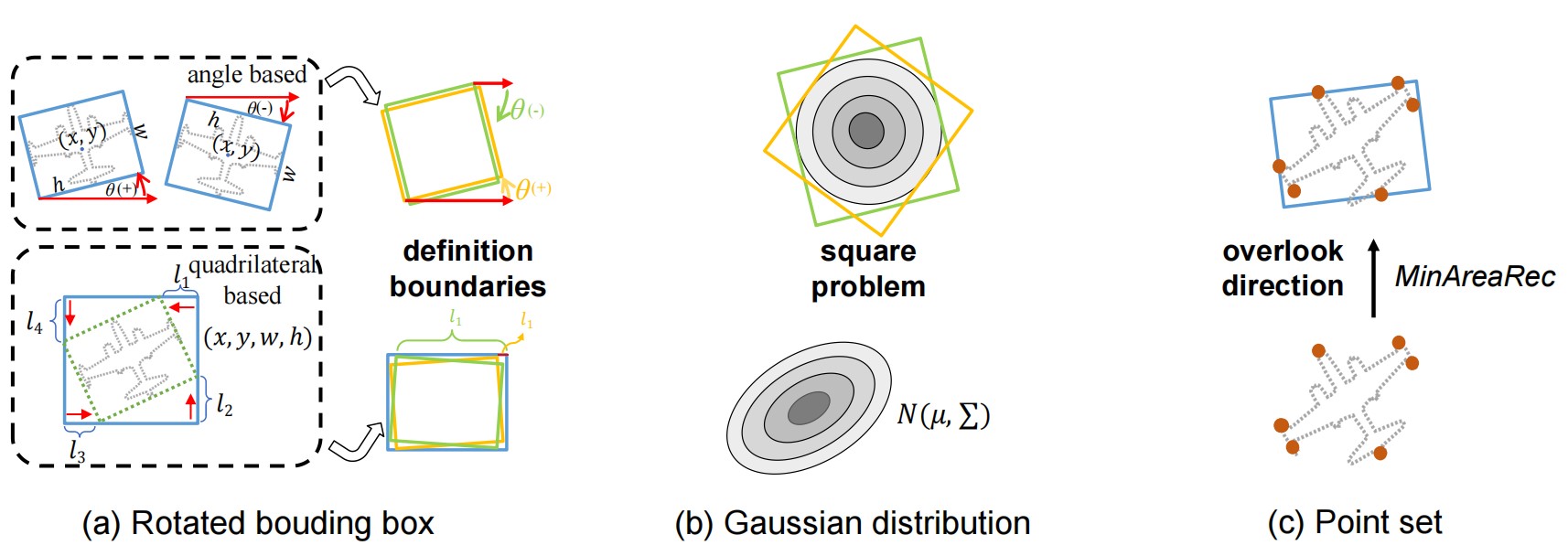
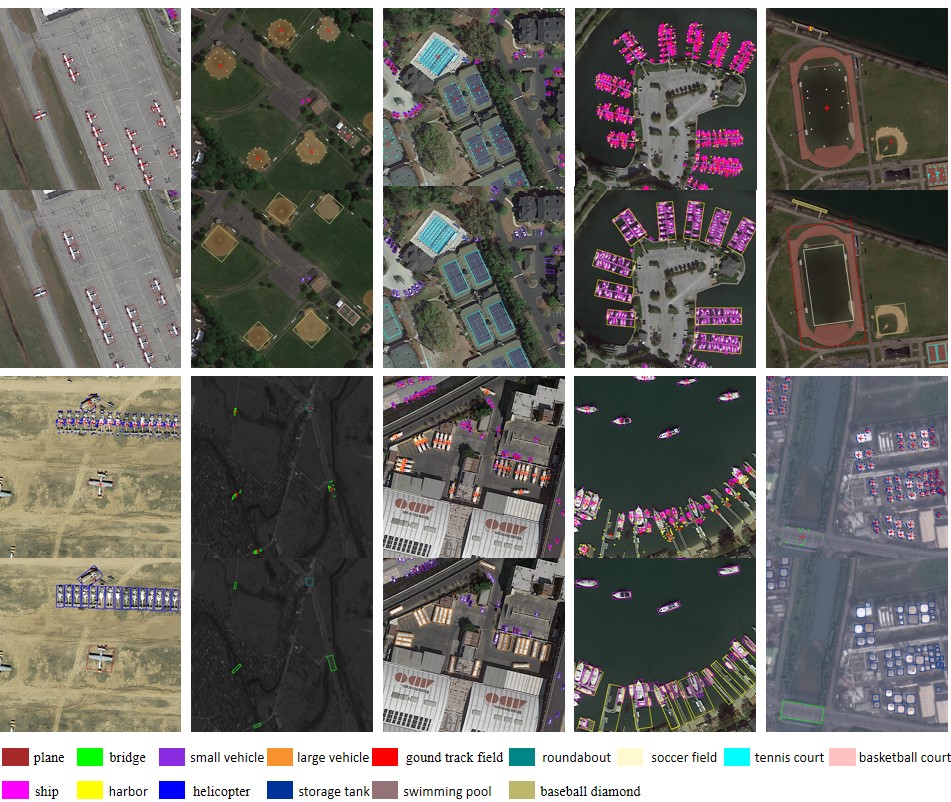
Previous Methods Based on Rotated Bounding Box
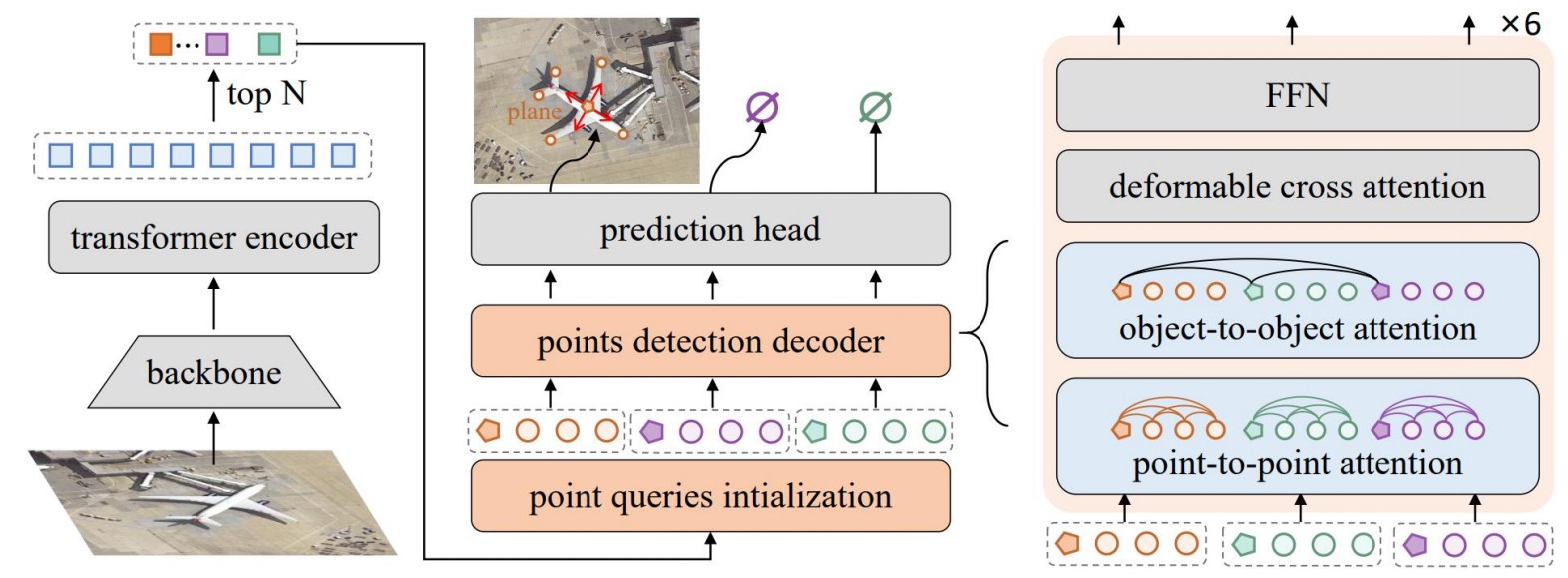
Oriented DETR via Point-Axis Representation
@article{zhao2024projecting,
title={Projecting Points to Axes: Oriented Object Detection via Point-Axis Representation},
author={Zhao, Zeyang and Xue, Qilong and He, Yuhang and Bai, Yifan and Wei, Xing and Gong, Yihong},
journal={arXiv preprint arXiv:2407.08489},
year={2024}
},